Abstract
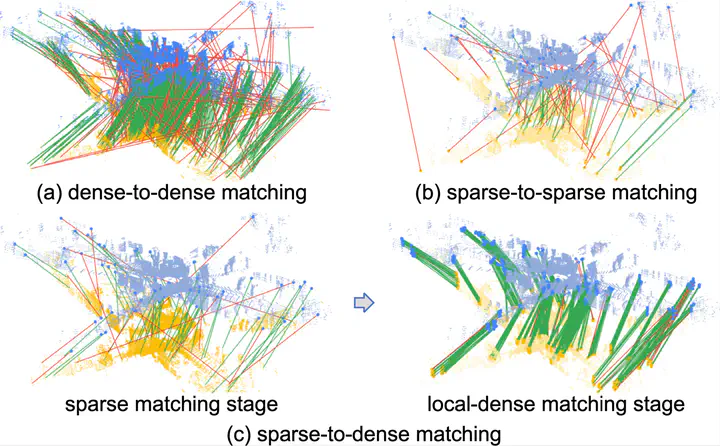
Point cloud registration is a fundamental problem in 3D computer vision. Previous learning-based methods for LiDAR point cloud registration can be categorized into two schemes: dense-to-dense matching methods and sparse-to-sparse matching methods. However, for large-scale outdoor LiDAR point clouds, solving dense point correspondences is time-consuming, whereas sparse keypoint matching easily suffers from keypoint detection error. In this paper, we propose SDMNet, a novel Sparse-to-Dense Matching Network for large-scale outdoor LiDAR point cloud registration. Specifically, SDMNet performs registration in two sequential stages: sparse matching stage and local-dense matching stage. In the sparse matching stage, we sample a set of sparse points from the source point cloud and then match them to the dense target point cloud using a spatial consistency enhanced soft matching network and a robust outlier rejection module. Furthermore, a novel neighborhood matching module is developed to incorporate local neighborhood consensus, significantly improving performance. The local-dense matching stage is followed for fine-grained performance, where dense correspondences are efficiently obtained by performing point matching in local spatial neighborhoods of high-confidence sparse correspondences. Extensive experiments on three large-scale outdoor LiDAR point cloud datasets demonstrate that the proposed SDMNet achieves state-of-the-art performance with high efficiency.
Fan Lu
Ph.D student
My research interests include 3D Computer Vision, Point Cloud Registration and Neural Rendering.