HRegNet: A Hierarchical Network for Efficient and Accurate Outdoor LiDAR Point Cloud Registration
Abstract
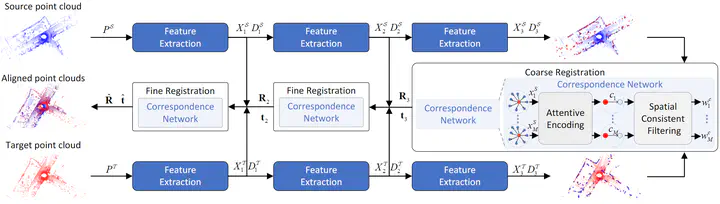
Point cloud registration is a fundamental problem in 3D computer vision. Outdoor LiDAR point clouds are typically large-scale and complexly distributed, which makes the registration challenging. In this paper, we propose an efficient hierarchical network named HRegNet for large-scale outdoor LiDAR point cloud registration. Instead of using all points in the point clouds, HRegNet performs registration on hierarchically extracted keypoints and descriptors. The overall framework combines the reliable features in deeper layer and the precise position information in shallower layers to achieve robust and precise registration. We present a correspondence network to generate correct and accurate keypoints correspondences. Moreover, bilateral consensus and neighborhood consensus are introduced for keypoints matching, and novel similarity features are designed to incorporate them into the correspondence network, which significantly improves the registration performance. In addition, we design a consistency propagation strategy to effectively incorporate spatial consistency into the registration pipeline. The whole network is also highly efficient since only a small number of keypoints are used for registration. Extensive experiments are conducted on three large-scale outdoor LiDAR point cloud datasets to demonstrate the high accuracy and efficiency of the proposed HRegNet.
Fan Lu
Ph.D student
My research interests include 3D Computer Vision, Point Cloud Registration and Neural Rendering.